




 19.53
19.53
 Rifqi Arridho Abid
Rifqi Arridho Abid

Project Assignment Ini Disusun Sebagai Syarat Akademik Program On The Job Training PT.Pembangkitan Jawa-Bali Angkatan XII
Disusun Oleh:
Donal Afriwandi
Hadratul Hendra
Rifqi Arridho Abid
Pinkan Dyah Bathari
Pada tiap-tiap unit pembangkit, terdapat kontrak/kesepakatan jual beli tenaga listrik antara PT. PLN P3B (Penyaluran dan Pusat Pengatur Beban) dengan pembangkit. Oleh karena itu, pembangkit memerlukan adanya Deklarasi Kesiapan Pembangkit (DKP) untuk memenuhi kontrak tersebut. Deklarasi Kesiapan Pembangkit yang harus dipersiapkan oleh unit pembangkitan diantaranya EAF (Equivalent Availabity Factor), EFOR (Equivalent Forced Outage Rate), SdOF (Suddent Outage Factor), Planned Outage (PO), Forced Outage (FO), Derating dan lain-lain.
Pada PT.Pembangkitan Jawa Bali Unit Pembangkitan Muara Tawar blok 5 merupakan pembangkit dengan sistem combined cycle, yang menggunakan pola operasi 1 unit Gas Turbine (GT), 1 unit Heat Recovery Steam Generator (HRSG) dan 1 unit Steam Turbine (ST).
Salah satu komponen pendukung yang terdapat pada GT 5.1 adalah Variable inlet guide vane (VIGV). VIGV merupakan suatu sistem yang mengatur volume aliran udara yang masuk ke dalam kompresor. Udara yang masuk akan digunakan untuk sealing, cooling dan pembakaran. Selain itu VIGV berperan untuk mengoptimalkan rasio udara dengan bahan bakar pada proses pembakaran. Pada VIGV GT 5.1 terdapat dua buah angle transmitter yang berfungsi untuk mengetahui posisi pembukaan VIGV. Jika terjadi deviasi pembacaan antara angle transmitter VIGV channel A dan B >4º maka akan mengakibatkan VIGV position failure PLST. Jika hal ini terjadi maka akan mempengaruhi nilai kesiapan pembangkit dan menyebabkan penurunan tingkat keandalan turbin gas.
2. Permasalahan
Permasalahan yang dikaji dalam pokok bahasan “Analisis Penambahan Indikator Lokal Variable Inlet Guide Vane (VIGV) pada GT 5.1 PT PJB UP Muara Tawar” adalah terjadinya deviasi antara angle transmitter channel A dan channel B >4º. Deviasi tersebut mengakibatkan VIGV position failure PLST. Agar alarm PLST tidak aktif lagi, maka salah satu dari angle transmitter VIGV harus di-disturb. Sehingga saat ini hanya satu angle transmitter channel A yang aktif. Terjadinya PLST akan mempengaruhi nilai kesiapan pembangkit dan menyebabkan penurunan tingkat keandalan turbin gas.
3. Fakta Yang Mempengaruhi
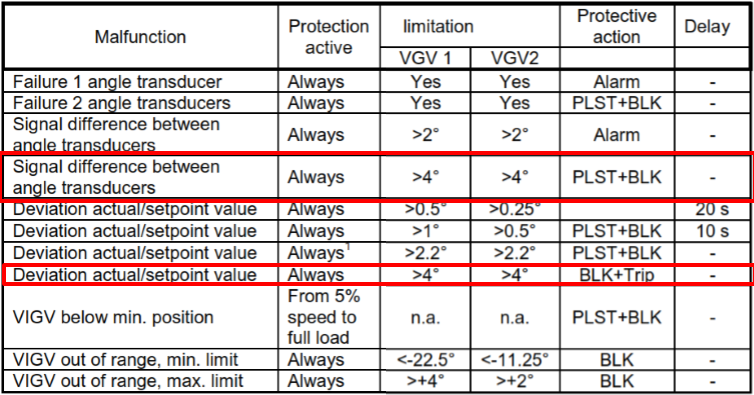
3.1 Protection List VIGV
Keseluruhan operasi kerja Turbin Gas diatur oleh sistem kontrol EGATROL . Dimana sistem kontrol tersebut menjaga keseluruhan proses tetap dalam batasan kerja masing masing peralatan. Jika suatu peralatan mengalami penyimpangan dari fungsi sebagai mana mestinya, dan melewati nilai batas tersebut, maka akan terjadi kegagalan fungsi opersai kerja. Dengan kata lain unit mengalami gangguan. Hal ini sangat berbahaya bagi kelangsungan kerja unit/sistem. Oleh karena itu dilakukan langkah pengamanan guna menghindari kerusakan lebih pada peralatan, yang disebut sistem proteksi.
1. Alarm
Peralatan terganggu. Muncul di Sequnce of Event Log
2. Protective Load Shedding (PLS)
Unloading 80 MW/menit hingga beban mencapai 0% dari nominalnya, namun rotor masih tetap berputar sesuai nominalnya (idle operation). GT dapat dihubungkan kembali kedalam jaringan, setelah penyebab PLS di reset terlebih
3. Protective Load Shedding Trip (PLST)
Prinsip kerja nya sama dengan PLS, namun setelah beban 6 MW unit akan Trip
4. Trip
Gangguan pada peralatan sudah dalam kondisi maksimal, unit di stop langsung dari kondisi berbeban (Generator Circuit Breaker lepas) tanpa unloading. Kondisi ini sangat rawan terhadap thermal stress
3.2 Deviasi Angle Transmitter A dan Angle Transmitter B
Di bawah ini menampilkan data recorder deviasi pembukaan VIGV Angle Transmitter A dan Angle Transmitter B pada tanggal 15 Agustus 2014 di UP Muara Tawar blok 5

Dari data di atas menunjukkan pada tanggal 15 Agustus 2014, pukul 12:55:37 WIB, terjadi deviasi pembacaan angle transmitter antara channel A dan B sebesar >4° saat proses naik beban menuju baseload (145 MW). Kontroller turbin Egatrol memerintahkan untuk pembukaan vigv pada setpoint -4,1°, akan tetapi pada angle transmitter channel A pembukaan sebesar -3,7° dan angle transmitter channel B pembukaan sebesar -8,9° sehingga terjadi deviasi antar angle transmitter >4°, deviasi ini menyebabkan alarm Protective Load Shedding Trip (PLST) aktif sehingga salah satu dari angle transmitter VIGV harus di-disturb agar alarm PLST tidak aktif lagi.
Berikut tampilan pada komputer Human Machine Interface (HMI) yang menampilan angle transmitter channel A aktif dan angle transmitter channel B di disturb.

4. Pembahasan
4.1 Dasar Teori Variable Inlet Guide Vane (VIGV)
Salah satu komponen pendukung yang terdapat pada GT 5.1 adalah Variable inlet guide vane (VIGV). VIGV merupakan suatu sistem yang berfungsi untuk mengatur volume aliran udara yang masuk ke dalam kompresor. Udara yang masuk tersebut akan digunakan untuk sealing, cooling dan pembakaran. Selain itu VIGV juga berperan untuk mengoptimalkan rasio udara dengan bahan bakar pada proses pembakaran.
Komponen utama pada VIGV adalah:a. Inlet guide vane yang terdiri dari 52 vane, berfungsi untuk mengarahkan aliran udara ke inlet kompresor

b. Hydraulic cylinder, berfungsi sebagai aktuator untuk menggerakkan vigv yang sudah terkopel dengan adjustment ring.

c. Safety and monitoring equipment (angle transmitter), berfungsi untuk mengetahui posisi pembukaan vigv

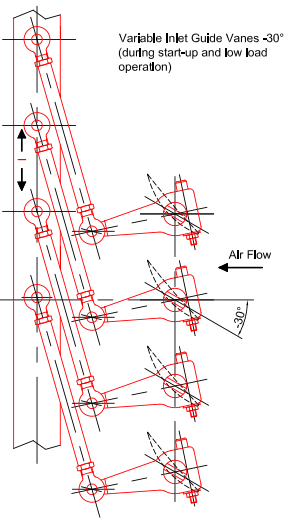
VIGV dipasang pada casing inlet compressor dan derajat pembukaanya diatur oleh kontroller turbin (Egatrol). VIGV digerakan oleh hydraulic piston dimana minyak penggeraknya disuplai oleh power oil system. Posisi pembukaan VIGV:
· Rotor Barring dan standstill : -65° (full closed)· Purging : 0° (full open)
· Start up : -30°
· Loading : -30° to 0° (base load)
 |
| VIGV Posisi Full Closed -65° |
 |
| VIGV Posisi Full Open 0° |


 |
| Grafik Proses Pembukaan VIGV Saat Startup Gas Turbine |
 |
| Kurva Hubungan Pembukaan VIGV dengan Temperature After Turbine (TAT), Turbine Inlet Temperature (TIT) saat startup dan loading |
Pada VIGV GT 5.1, terdapat dua buah angle transmitter yang berfungsi untuk mengetahui posisi pembukaan VIGV. Kesalahan pembukaan pada VIGV akan menyebabkan campuran antara udara dan bahan bakar tidak sesuai yang berakibat pada menurunnya efisiensi turbin gas, dan ketidakstabilan flame (api). Sehingga pada nantinya dapat menimbulkan vibrasi pada ruang bakar (pulsation) dan pada kasus yang sangat ekstrem dapat terjadi flame-off yang berakibat pada unit GT 5.1 trip. Salah satu faktor yang menyebabkan penurunan produksi dan tingkat keandalan turbin gas adalah kesiapan dari komponen angle transmitter pada sistem VIGV.
4.2 Perhitungan Equivalent Operating Hours (EOH)
4.2.1 Saat Terjadinya PLS
Salah satu faktor yang menyebabkan penurunan produksi dan tingkat keandalan turbin gas adalah kesiapan dari komponen angle transmitter pada sistem VIGV. Berikut merupakan perhitungan Equivalent Operating Hours (EOH) pada GT 5.1 yang diakibatkan oleh VIGV PLS:

Keterangan :
EOH : Equivalent Operating Hour
WOH : Weighted Operating Hour
WCE : Weighted Cyclic Events
OH : Operating Hour
CE : Cyclic Events
X and V : Weighting Factore
Z : Fuel Factore
Protective Load Shedding (PLS) adalah jenis pengaman operasi dimana beban gas turbin akan turun (80 MW/Menit) jika peralatan yang terganggu sudah mencapai batasannya, dan akan berhenti jika penyebab gangguan sudah hilang. Tetapi beban tidak akan kembali naik ke beban semula sebelum PLS direset.
Pada GT 5.1 terhitung EOH sebagai berikut saat terjadi PLS

Sehingga diperoleh WCE dan WOH sebesar:

Dengan penambahan EOH sebesar 52.5 dari EOH normal, maka terjadinya PLS ini merugikan unit dari sisi EOH. Sehingga keandalan unit berkurang dan mempercepat untuk dilaksanakannya proses inspeksi.
4.2.2 Saat Terjadinya Trip
Berikut akan ditampilkan perhitungan Weighted Cyclic Events (WCE) pada GT 5.1 saat trip yang diakibatkan oleh kesalahan pembukaan VIGV:
Dengan rumus :

Maka diperoleh penambahan faktor EOH (10 ∙ WCE) saat terjadi trip berdasarkan temperature sebagai berikut:
 |
| Tabel Penambahan Faktor EOH (10.WCE) saat Terjadi Trip Berdasakan Turbine Inlet Temperature (TIT) |
Dari data tabel diatas, penambahan EOH baik saat terjadi PLS/Trip berdasarkan Turbine Inlet Temperature GT 5.1 akan mempercepat proses pelaksanaan inspeksi. Semakin cepat periode inspeksi maka efisiensi unit akan menurun dari segi perhitungan unit.
4.3 Perhitungan Indikator Kinerja
Selain perhitungan EOH PLS dan trip, kejadian trip pada unit dapat mengakibatkan penurunan kinerja kesiapan dan keandalan unit. Berikut tabel perhitungan indikator kinerja blok 5 berdasarkan periode harian dan bulanan.
 |
| Pengaruh Unit Trip Terhadap EAF dan EFOR dalam Laporan Harian |
 |
| Pengaruh Unit Trip Terhadap EAF dan EFOR dalam Laporan Bulanan |
4.3.1 Perhitungan Kerugian Finansial Saat Trip
Perhitungan kerugian dari segi finansial akibat kejadian trip dapat dihitung dengan rumus sebagai berikut:

Dimana :
Hkap : Harga komponen A dimana penyusunnya adalah biaya pengembalian modal
Hfix : Harga komponen B dimana penyusunnya adalah biaya penggantian Operation & Maintenance
DMN : Daya Mampu Netto
Contoh perhitungan :
Terjadi trip selama 1 jam pada PLTGU Blok 5 dengan DMN : 214 MW,
Hkap : Rp 1,884,717
Hfix : Rp 223,060
Maka didapatkan:

Dengan rumus di atas, maka dapat diperhitungkan kerugian akibat trip selama 1 jam, 6, 12 dan 24 jam dalam tabel dibawah ini:

5. Kesimpulan
Berdasarkan hasil analisis diatas penambahan indikator lokal VIGV dirasa sangat penting. Hal ini didasarkan atas pertimbangan keuntungan dari penambahan indikator VIGV di lokal adalah:
1. Mengetahui keakuratan pembacaan dari angle transmitter antara di lokal dengan di HMI control room.
2. Mempermudah pada saat proses kalibrasi angle transmitter.
3. Sebagai pembanding apabila ada salah satu dari angle transmitter ada yang rusak atau error.
6. Saran
Berdasarkan kesimpulan yang ada, terdapat saran yaitu diperlukan penambahan indikator lokal VIGV yang bertujuan untuk mengetahui posisi pembukaan vigv yang aktual, sehingga memudahkan operator saat melakukan recording/patrol check jika terjadi deviasi operator bisa melaporkan secepat mungkin kepada pihak yang terkait . Indikator lokal vigv akan terpasang pada ring yang sudah terkopel dengan vigv, sehingga saat vigv membuka/ menutup indikator lokal yang berbentuk busur derajat ini akan bergerak sesuai sudut pembukaan vigv. Berikut adalah ilustrasi dari indikator lokal VIGV.

7. Referensi
1. Alstom Gas Turbine GT13E2 Manual Book
2. PROTAP Deklarasi Kesiapan Pembangkit-Indeks Kinerja Pembangkit
2. PROTAP Deklarasi Kesiapan Pembangkit-Indeks Kinerja Pembangkit
 Posted in:
PLTGU
Posted in:
PLTGU
 Bagikan Artikel Ini ke Teman Anda :
Bagikan Artikel Ini ke Teman Anda :
















